Synthetic Data for Non-rigid 3D Reconstruction
We introduce a synthetic dataset for evaluating no-rigid 3D reconstruction using a moving RGB-D camera. The dataset consist of two subjects captured with four different camera trajectories. For each case we provide frame-by-frame ground truth geometry of the scene, the camera trajectory and foreground mask. Our synthetic dataset can be downloaded at: https://doi.org/10.25919/5b7b60176d0cd Contact Dr. Peyman Moghadam for further information.
Detailed documentation and instructions are available in the User manual
synthetic dataset for evaluating no-rigid 3D reconstruction using a moving RGB-D camera
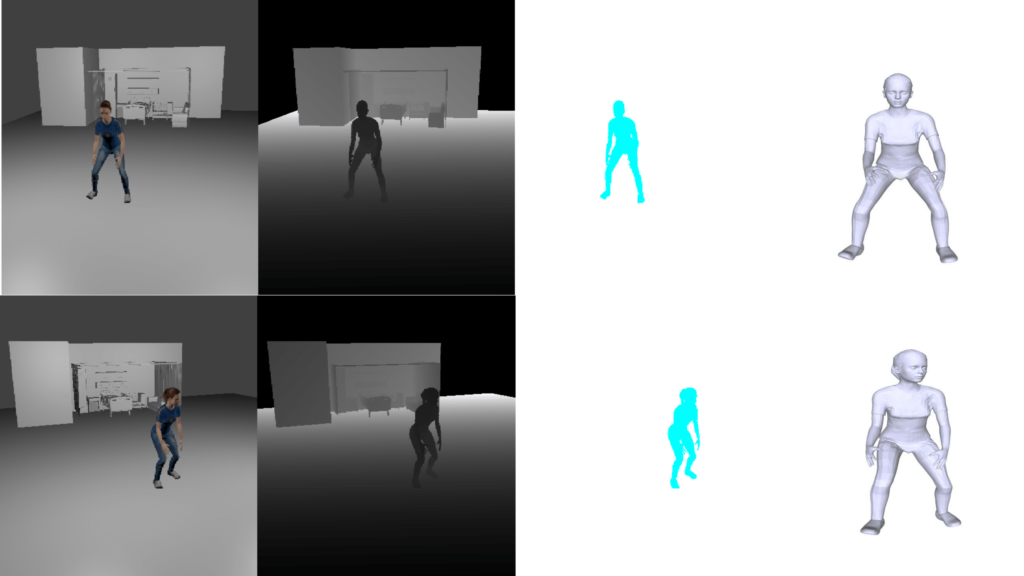
Synthetic dataset for evaluating no-rigid 3D reconstruction using a moving RGB-D camera. Each row shows RGB image, depth image, foreground mask, and corresponding live geometry mesh is shown
from left to right.
Attribution
To attribute this database, please include the following citations:
Elanattil, Shafeeq; Moghadam, Peyman (2018): Synthetic Data for Non-rigid 3D Reconstruction using a Moving RGB-D Camera. v1. CSIRO. Data Collection. https://doi.org/10.25919/5b7b60176d0cd
S. Elanattil, P. Moghadam, S. Sridharan, C. Fookes, and M. Cox, “Non-rigid reconstruction with a single moving RGB-D camera,” in 24th International Conference on Pattern Recognition (ICPR), 1049-1055, 2018
Licensing
The Synthetic Dataset is licensed under CSIRO Data Licence.